Gegen-EMK eines Permanentmagnet-Synchronmotors
1. Wie entsteht eine Gegen-EMK?
Die Entstehung der gegenelektromotorischen Kraft ist leicht zu verstehen. Das Prinzip besteht darin, dass der Leiter die magnetischen Kraftlinien schneidet. Solange eine Relativbewegung zwischen beiden besteht, kann das Magnetfeld stationär sein und der Leiter es schneiden, oder der Leiter kann stationär sein und das Magnetfeld bewegt sich.
Bei Permanentmagnet-Synchronmotoren sind die Spulen am Stator (Leiter) und die Permanentmagnete am Rotor (Magnetfeld) befestigt. Dreht sich der Rotor, rotiert das von den Permanentmagneten erzeugte Magnetfeld und wird von den Spulen am Stator unterbrochen, wodurch in den Spulen eine Gegen-EMK entsteht. Warum heißt diese Gegen-EMK? Wie der Name schon sagt, ist die Richtung der Gegen-EMK E entgegengesetzt zur Richtung der Klemmenspannung U (siehe Abbildung 1).
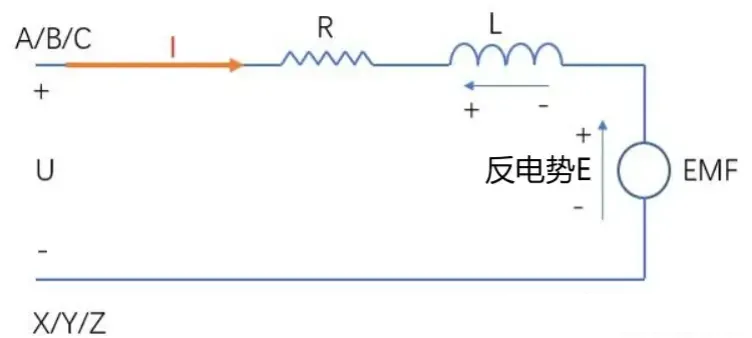
Abbildung 1
2.Welche Beziehung besteht zwischen Gegen-EMK und Klemmenspannung?
Aus Abbildung 1 ist ersichtlich, dass die Beziehung zwischen der Gegen-EMK und der Klemmenspannung unter Last wie folgt lautet:
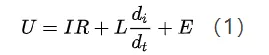
Der Test der gegenelektromotorischen Kraft wird üblicherweise im Leerlauf, ohne Strom und bei einer Drehzahl von 1000 U/min durchgeführt. Im Allgemeinen wird der Wert von 1000 U/min definiert als Gegen-EMK-Koeffizient = durchschnittlicher Gegen-EMK-Wert/Drehzahl. Der Gegen-EMK-Koeffizient ist ein wichtiger Parameter des Motors. Hierbei ist zu beachten, dass sich die Gegen-EMK unter Last ständig ändert, bevor die Drehzahl stabil ist. Aus Formel (1) können wir erkennen, dass die gegenelektromotorische Kraft unter Last kleiner ist als die Klemmenspannung. Wenn die gegenelektromotorische Kraft größer ist als die Klemmenspannung, wird er zu einem Generator und gibt Spannung nach außen ab. Da Widerstand und Strom im tatsächlichen Betrieb gering sind, ist der Wert der gegenelektromotorischen Kraft ungefähr gleich der Klemmenspannung und wird durch den Nennwert der Klemmenspannung begrenzt.
3. Die physikalische Bedeutung der Gegenelektromotorischen Kraft
Stellen Sie sich vor, was passieren würde, wenn die Gegen-EMK nicht existierte? Aus Gleichung (1) können wir ersehen, dass der gesamte Motor ohne die Gegen-EMK einem reinen Widerstand entspricht und zu einem Gerät wird, das viel Wärme erzeugt, was der Umwandlung von elektrischer Energie in mechanische Energie im Motor entgegensteht. In der Gleichung zur Umwandlung elektrischer Energie U ist die Eingangsenergie, beispielsweise die Eingangsenergie einer Batterie, eines Motors oder eines Transformators. I2Rt ist die Wärmeverlustenergie in jedem Schaltkreis, eine Art Wärmeverlustenergie. Je kleiner, desto besser. Die Differenz zwischen der Eingangsenergie und der Wärmeverlustenergie ist die nutzbare Energie, die der gegenelektromotorischen Kraft entspricht.
U ist die Eingangsenergie, beispielsweise die Eingangsenergie einer Batterie, eines Motors oder eines Transformators. I2Rt ist die Wärmeverlustenergie in jedem Schaltkreis, eine Art Wärmeverlustenergie. Je kleiner, desto besser. Die Differenz zwischen der Eingangsenergie und der Wärmeverlustenergie ist die nutzbare Energie, die der gegenelektromotorischen Kraft entspricht. Mit anderen Worten: Die Gegen-EMK dient der Erzeugung nutzbarer Energie und steht in umgekehrter Beziehung zum Wärmeverlust. Je größer der Wärmeverlust, desto geringer die nutzbare Energie. Objektiv betrachtet verbraucht die Gegen-EMK zwar elektrische Energie im Stromkreis, stellt aber keinen Verlust dar. Der der Gegen-EMK entsprechende Teil der elektrischen Energie wird in nutzbare Energie für elektrische Geräte umgewandelt, beispielsweise in mechanische Energie von Motoren oder chemische Energie von Batterien.
Mit anderen Worten: Die Gegen-EMK dient der Erzeugung nutzbarer Energie und steht in umgekehrter Beziehung zum Wärmeverlust. Je größer der Wärmeverlust, desto geringer die nutzbare Energie. Objektiv betrachtet verbraucht die Gegen-EMK zwar elektrische Energie im Stromkreis, stellt aber keinen Verlust dar. Der der Gegen-EMK entsprechende Teil der elektrischen Energie wird in nutzbare Energie für elektrische Geräte umgewandelt, beispielsweise in mechanische Energie von Motoren oder chemische Energie von Batterien.
Daraus lässt sich erkennen, dass die Größe der gegenelektromotorischen Kraft die Fähigkeit des elektrischen Geräts bedeutet, die gesamte Eingangsenergie in Nutzenergie umzuwandeln, was den Grad der Umwandlungsfähigkeit des elektrischen Geräts widerspiegelt.
4. Wovon hängt die Größe der gegenelektromotorischen Kraft ab?
Die Berechnungsformel für die gegenelektromotorische Kraft lautet: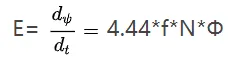
E ist die elektromotorische Kraft der Spule, ψ ist der magnetische Fluss, f ist die Frequenz, N ist die Anzahl der Windungen und Φ ist der magnetische Fluss.
Basierend auf der obigen Formel kann wohl jeder einige Faktoren nennen, die die Stärke der Gegenelektromotorischen Kraft beeinflussen. Hier ist ein Artikel zur Zusammenfassung:
(1) Die Gegen-EMK entspricht der Änderungsrate des magnetischen Flusses. Je höher die Geschwindigkeit, desto größer die Änderungsrate und desto größer die Gegen-EMK.
(2) Der magnetische Fluss selbst entspricht der Anzahl der Windungen multipliziert mit dem magnetischen Fluss einer einzelnen Windung. Je höher also die Anzahl der Windungen, desto größer der magnetische Fluss und desto größer die Gegen-EMK.
(3) Die Anzahl der Windungen hängt vom Wicklungsschema ab, beispielsweise von der Stern-Dreieck-Schaltung, der Anzahl der Windungen pro Nut, der Anzahl der Phasen, der Anzahl der Zähne, der Anzahl der parallelen Zweige und dem Voll- oder Kurzpitch-Schema.
(4) Der magnetische Fluss einer Windung entspricht der magnetomotorischen Kraft geteilt durch den magnetischen Widerstand. Je größer also die magnetomotorische Kraft, desto kleiner der magnetische Widerstand in Richtung des magnetischen Flusses und desto größer die Gegen-EMK.
(5) Der magnetische Widerstand hängt vom Luftspalt und der Pol-Schlitz-Koordination ab. Je größer der Luftspalt, desto größer der magnetische Widerstand und desto geringer die Gegen-EMK. Die Pol-Schlitz-Koordination ist komplexer und erfordert eine spezifische Analyse.
(6) Die magnetomotorische Kraft hängt vom Restmagnetismus des Magneten und seiner Wirkfläche ab. Je größer der Restmagnetismus, desto höher die Gegen-EMK. Die Wirkfläche hängt von der Magnetisierungsrichtung, der Größe und der Platzierung des Magneten ab und erfordert eine spezifische Analyse.
(7) Der Restmagnetismus hängt von der Temperatur ab. Je höher die Temperatur, desto geringer ist die Gegen-EMK.
Zusammenfassend lässt sich sagen, dass die Faktoren, die die Gegen-EMK beeinflussen, die Rotationsgeschwindigkeit, die Anzahl der Windungen pro Schlitz, die Anzahl der Phasen, die Anzahl der parallelen Zweige, die volle und die kurze Teilung, der Magnetkreis des Motors, die Luftspaltlänge, die Pol-Schlitz-Anpassung, der Restmagnetismus des magnetischen Stahls, die Platzierung und Größe des magnetischen Stahls, die Magnetisierungsrichtung des magnetischen Stahls und die Temperatur sind.
5. Wie wählt man die Größe der gegenelektromotorischen Kraft bei der Motorkonstruktion aus?
Bei der Motorkonstruktion ist die Gegen-EMK E von großer Bedeutung. Bei guter Auslegung (passende Größe, geringe Wellenformverzerrung) ist der Motor einwandfrei. Die Gegen-EMK hat mehrere wichtige Auswirkungen auf den Motor:
1. Die Stärke der Gegen-EMK bestimmt den schwachen magnetischen Punkt des Motors und der schwache magnetische Punkt bestimmt die Verteilung der Motoreffizienzkarte.
2. Die Verzerrungsrate der Gegen-EMK-Wellenform beeinflusst das Motorwelligkeitsdrehmoment und die Gleichmäßigkeit der Drehmomentabgabe bei laufendem Motor.
3. Die Größe der Gegen-EMK bestimmt direkt den Drehmomentkoeffizienten des Motors, und der Gegen-EMK-Koeffizient ist proportional zum Drehmomentkoeffizienten.
Daraus ergeben sich folgende Widersprüche in der Motorauslegung:
a. Wenn die Gegen-EMK groß ist, kann der Motor im Niedriggeschwindigkeitsbereich beim Grenzstrom des Reglers ein hohes Drehmoment aufrechterhalten, bei hoher Geschwindigkeit kann er jedoch kein Drehmoment abgeben und kann nicht einmal die erwartete Geschwindigkeit erreichen.
b. Bei geringer Gegen-EMK verfügt der Motor im Hochgeschwindigkeitsbereich zwar noch über Leistungsvermögen, bei niedriger Drehzahl kann das Drehmoment jedoch mit gleichem Reglerstrom nicht mehr erreicht werden.
6. Die positive Auswirkung der Gegen-EMK auf Permanentmagnetmotoren.
Die Existenz einer Gegen-EMK ist für den Betrieb von Permanentmagnetmotoren sehr wichtig. Sie kann den Motoren einige Vorteile und besondere Funktionen verleihen:
a. Energieeinsparung
Die von Permanentmagnetmotoren erzeugte Gegen-EMK kann den Strom des Motors reduzieren und dadurch den Leistungsverlust verringern, den Energieverlust reduzieren und das Ziel der Energieeinsparung erreichen.
b. Drehmoment erhöhen
Die Gegen-EMK ist der Versorgungsspannung entgegengesetzt. Mit zunehmender Motordrehzahl steigt auch die Gegen-EMK. Die Sperrspannung verringert die Induktivität der Motorwicklung, was zu einem Anstieg des Stroms führt. Dadurch kann der Motor zusätzliches Drehmoment erzeugen und seine Leistung verbessern.
c. Rückwärtsverzögerung
Nachdem der Permanentmagnetmotor aufgrund der vorhandenen Gegen-EMK an Leistung verloren hat, kann er weiterhin einen magnetischen Fluss erzeugen und den Rotor weiter rotieren lassen, wodurch der Effekt der Gegen-EMK-Rückwärtsgeschwindigkeit entsteht, der in einigen Anwendungen, wie beispielsweise Werkzeugmaschinen und anderen Geräten, sehr nützlich ist.
Kurz gesagt: Die Gegen-EMK ist ein unverzichtbares Element von Permanentmagnetmotoren. Sie bietet viele Vorteile für Permanentmagnetmotoren und spielt eine wichtige Rolle bei deren Konstruktion und Fertigung. Größe und Wellenform der Gegen-EMK hängen von Faktoren wie Konstruktion, Herstellungsprozess und Einsatzbedingungen des Permanentmagnetmotors ab. Größe und Wellenform der Gegen-EMK haben einen wichtigen Einfluss auf die Leistung und Stabilität des Motors.
Anhui Mingteng Permanentmagnet-Elektromechanische Ausrüstung Co., Ltd. (https://www.mingtengmotor.com/)ist ein professioneller Hersteller von Permanentmagnet-Synchronmotoren. Unser technisches Zentrum beschäftigt über 40 F&E-Mitarbeiter, aufgeteilt in drei Abteilungen: Design, Prozess und Prüfung. Wir sind auf die Forschung und Entwicklung, das Design und die Prozessinnovation von Permanentmagnet-Synchronmotoren spezialisiert. Mithilfe professioneller Designsoftware und selbst entwickelter spezieller Designprogramme für Permanentmagnetmotoren werden während des Motordesign- und -herstellungsprozesses Größe und Wellenform der Gegen-EMK sorgfältig entsprechend den tatsächlichen Anforderungen und spezifischen Arbeitsbedingungen des Anwenders berücksichtigt, um die Leistung und Stabilität des Motors zu gewährleisten und seine Energieeffizienz zu verbessern.
Urheberrecht: Dieser Artikel ist ein Nachdruck der öffentlichen WeChat-Nummer „电机技术及应用“, der ursprüngliche Link https://mp.weixin.qq.com/s/e-NaJAcS1rZGhSGNPv2ifw
Dieser Artikel spiegelt nicht die Ansichten unseres Unternehmens wider. Sollten Sie andere Meinungen oder Ansichten haben, korrigieren Sie uns bitte!
Veröffentlichungszeit: 20. August 2024